Vibration of composite floor structures
In British Standard 6472, Evaluation of human exposure to vibration in buildings (1 Hz to 80 Hz), the performance of a […]
This volume provides an introduction to the theory and design of composite structures of steel and concrete. Readers are assumed to be familiar with the elastic and plastic theories for bending and shear of cross-section of beams and columns of a single material, such as structural steel, and to have some knowledge of reinforced concrete. No previous knowledge is assumed of the concept of shear connection within a member composed of concrete and structural steel, nor of the use of profiled steel sheeting in composite slabs. Shear connection is covered in depth in Chapter 2 and Appendix A, and the principal types of composite member in Chapter 3, 4 and 5. All material of a fundamental nature that is applicable to both buildings and bridges is included, plus more detailed information and a worked example related to building. Subjects mainly relevant to bridges are covered in Volume 2. These include composite plate and box girders and design for repeated loading.
In British Standard 6472, Evaluation of human exposure to vibration in buildings (1 Hz to 80 Hz), the performance of a […]

In the preceding examplem the stress normal to the interface AOB (Fig.2.2) was everywhere compressive and equal to w/2b except at

This test has been developed in Australia since 1989(30.31) for profiles that provide ductile shear connection A piece of sheeting

The effectiveness of shear connection is studied by means of loading tests on simply by means of loading tests on

25.1 Stud connectors used with profiled steel sheeting Where profiled sheeting is used, stud connectors are located within con-crete ribs
Stud connectors used with profiled steel sheeting Read Post »

A composite beam is usually designed first for ultimate limit states. Its behaviour in service must then be checked. For a
Flitched beams, whose strength depended on shear connection between parallel timbers, were used in mediaeval times, and survive today in the
Simply-supported beam of rectangular cross-section Read Post »
Cracking of concrete The lower surface of the slab is protected by the sheeting. Cracking will occur in the top
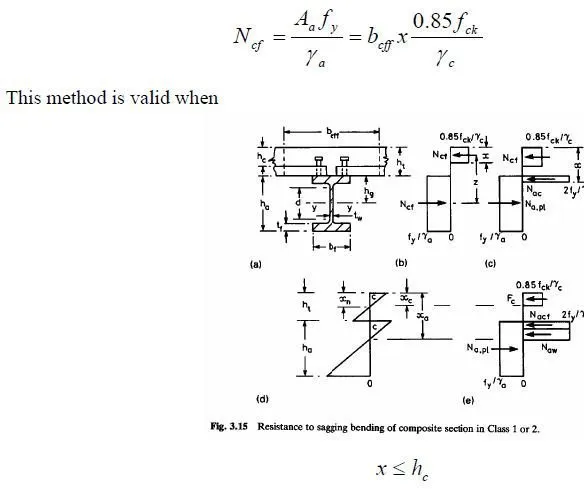
Cross-sections in Class 1 or 2 The methods of calculation for sections in Class 1 or 2 are in principle

For profiled sheeting that relies on frictional interlock to transmit longitudinal shear, there is no satisfactory conceptual model. This led to
Resistance of composite slabs to longitudinal shear Read Post »