Potential energy
To see these principles applied, we analyze a very simple structure, a taut rope (see Fig. 1.5). Imagine that the […]
To see these principles applied, we analyze a very simple structure, a taut rope (see Fig. 1.5). Imagine that the […]
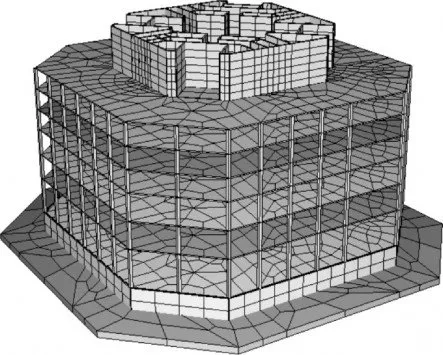
FE method = restriction Analyzing a structure with finite elements essentially amounts to constraining the structure (see Fig. 1.1), because
In this introductory chapter various aspects of the FE method are studied, initially highlighting the key points.