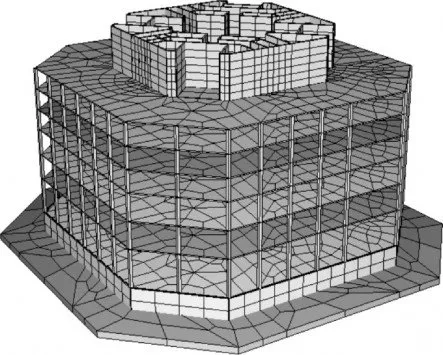
To see these principles applied, we analyze a very simple structure, a taut rope (see Fig. 1.5).
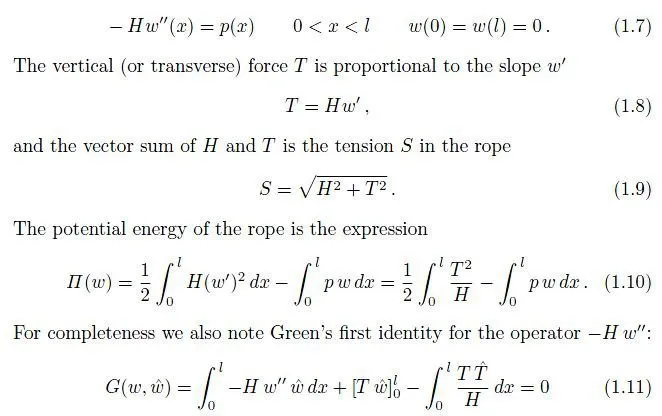
Imagine that the rope is pulled taut by a horizontal force H and that it carries a distributed load p. The distribution of the vertical force V within the rope and the deflection w of the rope are to be calculated. The deflection w is the solution of the boundary value problem
because it encapsulates the structural mechanics of the rope.
To approximate the deflection w(x) of the rope, the rope is subdivided into four linear elements: see Fig. 1.5. The first and the last node are fixed so that only the three internal nodes can be moved. Between the nodes the deflection is linear, that is the rope is only allowed to assume shapes that can be expressed in terms of the three unit displacements Ï•i(x) of the three internal nodes (see Fig. 1.5).
The nodal deflections, w1, w2, w3, play the role of weights. They signal how much of each unit deflection is contained in wh.
All these different shapes let the numbers w1, w2, w3 vary from −∠to +∠constitute the so-called trial space Vh.
The space Vh itself is a subset of a greater space, the deformation space V of the rope. The space V contains all deflection curves w(x) that the rope can possibly assume under different loadings during its lifetime. It is obvious that the piecewise linear functions wh in the subset Vh represent only a very small fraction of V .
The next question then is: what values should be chosen for the three nodal deflections w1, w2, w3 of the FE solution? What is the optimal choice?
According to the principle of minimum potential energy, the true deflection w results in the lowest potential energy on V
wins the competition on the small subset Vh ⊂ V . Then Π(wh) is as close as
possible to Î (w) on Vh. Because each function wh in Vh is uniquely determined by the nodal deflections
wi at the three interior nodes, i.e. the vector w = [w1, w2, w3]T, the potential energy on Vh is a function of these three numbers only

is the best approximation on Vh.
{kind=link}